

 联系我们
联系我们


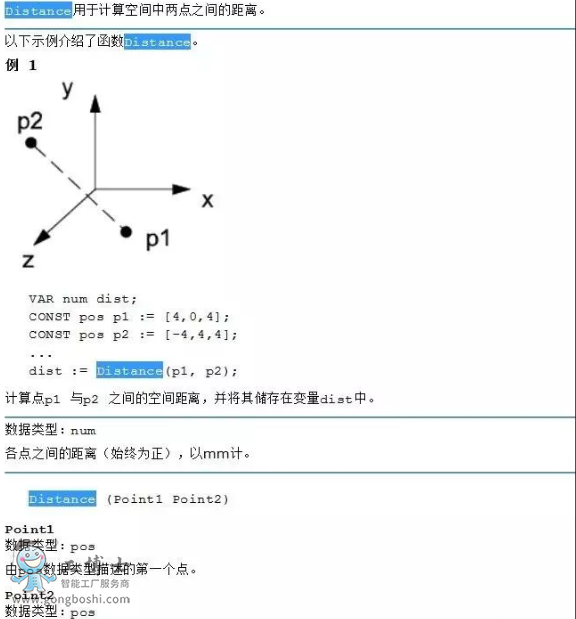
2)distance函数的输入为pos类型,即xyz。如果直接使用robtarget,可以使用p10.trans来提取pos
3)插入赋值语句,右边选择function,找到distance

点击更改类型,找到robtarget,选择target_220

点击编辑,添加记录组件,插入.trans

4)计算后可以加入写屏,完整代码如下


- 下一篇:ABB工业机器人单独导入程序方法及步骤
- 上一篇:ABB:直面数字化转型的机遇与挑战
联系热线:13397493317 联系人:刘芳香 联系地址:上海市嘉定区南翔镇众仁路399号B栋20层2007-2012
技术和报价服务:星期一至星期六8:00-22:00 ABB机器人配件服务商
